
運用三次元影像測量儀進行商品原件的數字化時,首要需求將測量結果以三坐標測量軟件自身具有的VDA數據格局表達出來,而此刻商品的數據模型并不是很直觀
從純測量角度看,加工技術與測量似乎沒有直接的關系,實踐上,除了加工設備與工夾具所形成的(相對確定的)誤差以外,零件誤差的來歷首要在于加工技術與加工辦法方面,零件的加工技術是對零件測量誤差來源分析的依據。
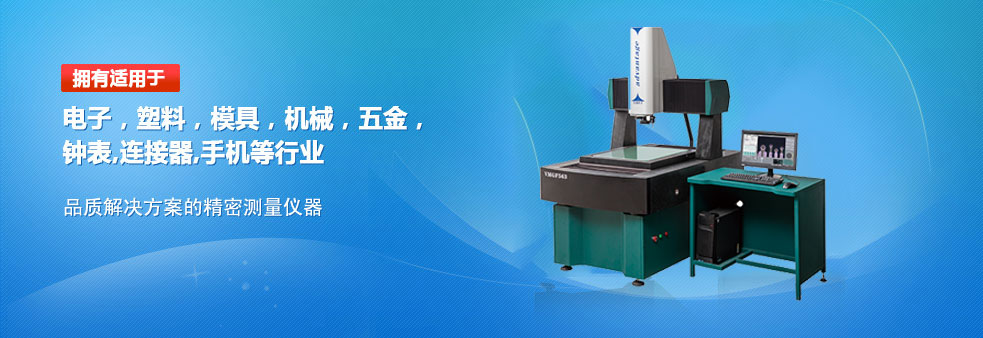
全自動影像測量儀使用光的反射原理,經過圖畫傳感器拍照工件影像進行處理測量。而傳統的使用觸摸式測頭獲取空間點坐標,經過計算得到被測物體的幾何參數。
全自動影像測量儀直接測量法的優勢在于對小模數齒輪的測量。當被測齒輪模數較小時,其齒槽難以放下上述辦法中使用的圓柱,必須以另外的方法建立漸開線齒形的測量坐標系。
全自動影像測量儀視點角度測量竅門二:回歸直線誤差小。有很多檢查人員反應,在測量視點時,重復精度很差,同一個相同的辦法,兩次測量重復差別達0.5度之多。
手動式光學投影儀在進行基準測量時,需要旋轉發物渠道上的分度盤,將零件的基準邊調整到平行于渠道的一個坐標軸,這是由于它的初級軟件不能支持極度復雜的空間幾許換算。
二次元影像測量儀的測座,依據不同的狀況,咱們一般將其分為以下三類:1、測頭手動旋轉測座,根本型,經濟實用的集成式測頭和測座體系,二次元影像測量儀的這類測座能夠手動定位內置測頭的方位,從而在空間內完結二次元對工件一切特征的測量。
大量走訪和調研中,全自動影像測量儀報告《陳述》課題組發現,一系列現實情況阻礙了試驗室“藍領”向“灰領”轉型。首要,缺罕見針對性的培育和訓練。57%的試驗員反映罕見學習充電的時機;78%的人在曩昔一年中參加過的訓練不到2次;而在平時作業中,除了給一
在全自動影像測量儀上的測量均是單軸或二維平面坐標的測量,測量時先對焦,后對準,再讀數(計數),最終計算處理。讀數來自于標尺即光柵體系,對焦對準依托顯微鏡光學體系,還有一個直接影響測量作用和精度的照明光源,根據全自動影像測量儀辦法測量的儀器,